版权所有 深圳真李王朝贸易有限公司 粤ICP备16026446号
联系电话:15173619381 联系手机:15173619381 E-MAIL:www.51xipan.com 邮政编码:400042 公司地址:广东省东莞市寮步镇寮东路
深圳真李王朝贸易有限公司专业生产吸盘20年,为您提供CPSR海绵吸具/真空吸盘/海绵吸盘/玻璃吸盘等吸具吊具.
本文从接触式真空吸取的技术需求出发,分析了接触式真空吸盘的设计要求和主要结构形式,阐述了接触式真空吸取技术由非金属材料常规吸盘到形状自适应和人工弹性材料仿生吸盘的发展历程,研究了真空吸取力产生方法由外部负压源抽吸到吸盘变形改变内容积、吸盘材料优化等多种方法的发展趋势。随着研究的深入和技术的进步,合理利用新技术和新方法,能优化吸盘结构、增强吸取效果,推动接触式真空吸取技术朝着多工况适应、多形状夹持、高效节能等方向发展。
接触式真空吸取技术广泛应用于工农业生产和人民生活中,利用负压来夹持工件,具有成本低廉、结构简单、使用方便等优点。真空吸取的执行器为真空吸盘,采用负压抽吸等方法在吸盘内产生一定的真空度,从而吸着工件。在半导体工业中,利用真空吸盘显像管、包装盒等工件,完成物流输送、自动装配等工序;在食品生产与加工中,真空吸盘运送糕点、瓜果等食品,免人工,安全卫生而高效;在新兴的机器人技术领域,爬墙机器人安装了真空吸盘,轻松地吸附于高层建筑墙面,服务型机器人末端的真空吸盘则为服务对象快速安全地拿取所需的物品。真空吸盘易实现柔性夹持,对物件表面损伤小,具有安全、可靠、价格低廉、轻便、节能等优点,而气压驱动的高柔顺性更易于实现仿生结构,具有良好的前景。本文从夹持的需求出发,分析了接触式真空吸取技术的研究现状,展望其发展前景。
夹持需求包括两个方面,一是吸盘能适应物件的形状,与物件有效贴合,一是提供可靠的真空度。接触式真空吸取技术为自动化物流和机器人提供了便利的真空夹持方法,而生产技术的进步又对真空吸取技术提出了更高的要求。夹持工作环境趋于多样化,例如,人类探寻海洋深处的秘密需要适应水下环境,空间探测则需要适应宇宙环境。混流生产工件形状的多元化需要夹持器能适应多种工件形状。社会服务需求的增多,需要大量能提供生活服务的机器人,而这些机器人是否具有灵活可靠的夹持末端,大大影响服务的效果。另外,全球性能源短缺,使得节约能源成为人类的迫切需求。这些新要求促使接触式真空吸取技术朝着多工况适应、多形状夹持、高效节能等方向发展。
2.1、真空吸盘结构形式
真空吸盘为接触式真空吸取的末端执行器。常规吸盘的材料为丁腈橡胶、硅橡胶、聚氨酯、氟化橡胶等弹性较好的非金属材料,结构形式多为平直型、深凹型、风琴型等,并可根据工件的结构尺寸专门设计微型或大型吸盘。针对现行负压吸盘的刚度和形状不能调整所带来的问题,国内外研究者对吸盘材质和形状进行了研究和探索。通过在吸盘连接处设计缓冲连接器,改变缓冲连接器的弹性和形状来调节吸盘的刚度和夹持耦合面,以适应更多工作条件的要求。图1 为球铰式吸盘,吸盘可适应工件吸附表面的倾斜而自由转动,吸盘体上的抽吸孔通过贯穿球节的孔,与安装在球节端部的吸盘相通。
由于单个吸盘提供的吸着面有限,在实际运用中常采用多个吸盘一起工作的安装方式。叶鹏等发明了一种具有姿态自主检测和吸附面自适应能力的负压吸附模块(图2),通过倾角传感器测量吸附模块相对于吸附面的位置和姿态,通过距离传感器测距计算出吸盘面与被吸附面间的夹角和距离,从而调整装置的位置参数,更好地适应吸附面。
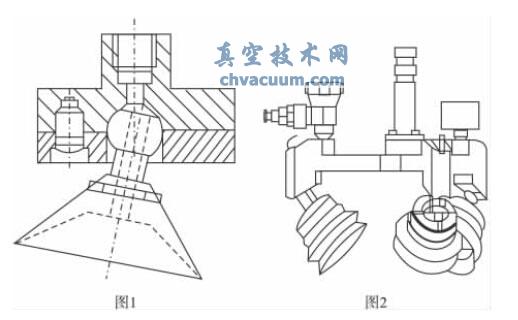
图1 球铰式吸盘结构示意
图2 吸附面自适应负压吸附模块
孙锦山等研制了气动多吸盘爬墙机器人(图3),多个吸盘提供了更大的吸着面。与图2 所示装置不同,各吸盘之间采用了柔性驱动器连接,能实现一定范围内的弯曲,由于吸盘之间的相对位置可以随柔性驱动器的弯曲而改变,因此控制策略更为简单。
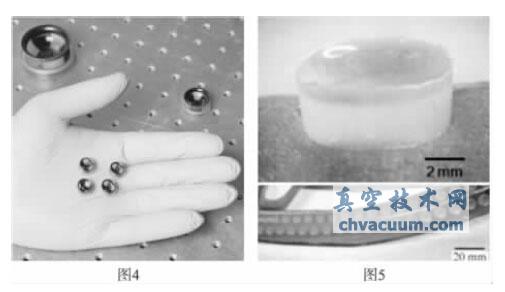
图3 气动多吸盘爬墙机器人
2.2、真空吸取力产生方法
将吸盘腔室内的气体抽去,从而产生负压吸引力,是最基础的吸取力产生方式,这种方法的前提是吸盘需和物体紧密接触,使吸盘腔室密闭。通过吸盘对物体的贴附,产生密闭腔室,采用真空泵或其他真空发生元件产生真空。
针对吸盘吸取工件动态过程的特点,为了使吸盘的工作更安全可靠,滕红华等在对吸盘两个典型工位的受力进行静动态分析和比较的基础上,为真空吸盘的设计应用提供更科学、更安全的设计依据。昌先国等为了保证真空吸取力,设计了多真空室吸盘,在一组真空室中,当部分真空室由于空气泄漏自行封闭,而其他真空室仍正常工作来提供机器人所需的足够的吸附力,并对不同的壁面进行了吸附实验。在有沟槽的壁面,起吸附作用的小真空室的负压照样能建立,只是负压略低。
3.1、仿生吸盘
由于常规吸盘多针对特定的工件要求,多适用于平整光滑的平面,适应的工件形状种类少。为了适应多种工件的夹持需求,基于海洋软体生物灵感, 国内外学者对仿生吸盘进行了研究。Frank W Grasso 等分析了章鱼吸盘的特点,并指出制造的人工吸盘必须满足三个功能,即具有漏斗状结构提供表面密封以适应任意几何表面;具备人工吸盘结构可以产生吸着所需负压力;外部肌肉使得被吸着的表面能随机械臂自由旋转。
周利坤等用仿生学原理和真空吸附原理,以三种仿生凹形漏斗吸盘结构模型为基础,结合章鱼吸盘平行或并列规则布局的特点,建立基于仿生单元体的矩形布局或者菱形布局规律的仿生随机轮胎布局模型。通过力学分析,胎面吸盘式花纹绝大部分与冰面发生有效吸附,可确保提供足够的吸附力,提高汽车在冰面上的防滑能力。但是,因为章鱼吸盘的肌肉组织数目庞大、紧密填满,并具有三维结构特征,人工加工难度较大。美国科学家用复合材料3D 打印技术制作人工吸盘样品,每个吸盘只有指甲盖大小(图4),并使用这样的吸盘在陆地上进行了吸着实验。科学家们预测,这样的吸盘在水下使用时性能可能进一步提升,因为水压能提供更大的压力。对于机器人的执行末端,制造像章鱼吸盘那样的人造装置,需要制作大量的如章鱼组织的人工肌肉单元,技术难度较高,也需要较高的加工成本。为了找到更易实现的结构,Jingping Hou 等研究了鱿鱼吸盘的仿生结构特性,并以此为基础设计并制作了人工鱿鱼吸盘(图5),可用于软体机器人末端执行器。
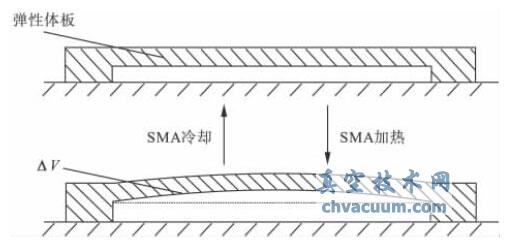
图4 仿章鱼吸盘样品
图5 人工仿鱿鱼吸盘
随着气动技术、生物技术和材料技术的融合,仿生真空吸取技术方兴未艾,这类新兴的仿生吸盘,使用人工弹性材料,模拟海洋软体生物变形和吸着。与常规吸盘相比,仿生吸盘能耗更少,适应性更强,有着良好的发展前景。
3.2、吸盘变形产生真空度
改变吸着容积,从而改变吸着腔压力的方法是另一种真空吸取力产生方法,弹性体材料围成一个密闭容腔,弹性体材料变形,使吸盘内腔室容积改变,以产生负压。胡冰山等设计了带偏置弹簧的偏动式SMA 弹簧驱动器驱动仿生负压吸盘(图6),建立了该吸盘的理论模型,并通过实验验证了理论模型,吸盘内的负压可达约12 kPa,且能耗更少。
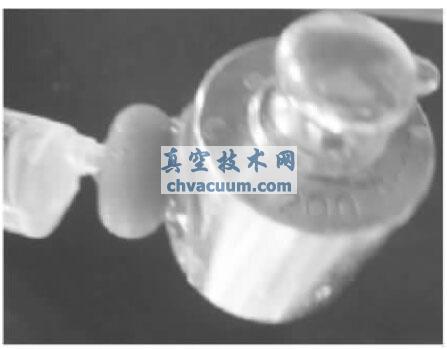
图6 SMA 弹簧驱动器驱动仿生负压吸盘原理示意
3.3、吸盘材料优化
除了负压抽吸、改变吸着容积等方法获得一定的真空度,吸盘的材料性质和吸着面的微结构也会对吸着效果产生一定的影响。
Follador 等采用绝缘弹性材料来模拟肌肉柱状纤维束结构,以形成紧密的吸着和密封。Tramacere 等比较了吸着面的微小褶皱构造对吸着效果的影响,在水下静态吸着实验中(图7),液体的种类及杂质、水温、吸盘吸着面的材质特性都会影响吸着效果。根据章鱼吸盘的解剖结构,除了依靠顶端的空腔和柔软的侧边来制造压力(差)来形成密闭的真空以外,小吸盘材料也有特别之处。基于显微镜和显微CT(微计算机断层扫描技术)的观察结果,吸盘的侧面和边缘生长着细小的同轴排列的纤维丛,有助于在水底凹凸不平的表面上制造密闭真空。
图7 水下静态吸着实验
本文综述了真空吸取技术的研究现状,介绍了真空吸盘常见结构形式和真空吸取的方法,调研了仿生吸盘的研究进展和实现方法。随着研究的深入和技术的进步,合理利用新技术和新方法,能优化吸盘结构、增强吸取效果,推动接触式真空吸取技术朝着多工况适应、多形状夹持、高效节能等方向发展。
全国统一服务热线
15173619381我们的邮箱
www.51xipan.com版权所有 深圳真李王朝贸易有限公司 粤ICP备16026446号
联系电话:15173619381 联系手机:15173619381 E-MAIL:www.51xipan.com 邮政编码:400042 公司地址:广东省东莞市寮步镇寮东路
深圳真李王朝贸易有限公司专业生产吸盘20年,为您提供CPSR海绵吸具/真空吸盘/海绵吸盘/玻璃吸盘等吸具吊具.
在线客服
